
When designing WiFi networks, everybody thinks about the “coverage” first.
Are you covering correctly? Yes. Then it is OK. If you need more data, more capacity, more speed; just add more APs.
It seems simple, but is is not so simple in the real world.
Also, I’m hearing such statements that “Our hall-placed APs were good at first but when many clients from different rooms connect to the same AP at the same time, the WiFi performance suffers”
Why is this the case? What is the missing point here?
It is “hidden node problem” and it is one of the highly under-estimated problems in the entire WiFi world today.
According to the simple rule of CSMA/CA mechanism used in 802.11, all stations should be able to hear each other. This is the rule.

Think about the station B is the Access Point, in the above diagram.
Station A can transmit data to the AP (station B) and the AP can transmit data to the station A.
On the other hand. Station C can transmit data to AP, and the AP can transmit data to the station C.
All seems correct, right? A can hear the AP, C can hear the AP; that means AP can cover the stations, so there shouldn’t be any problem.
However, we have a big problem here. The stations A and C, cannot hear each other. In other words, their transmissions cannot reach each other. So that’s a problem and this is called “Hidden Node Problem” because in our diagram, Client A and Client C are “hidden” from each other.
Why is this a problem?
CSMA/CA works like (simply) “if somebody is not transmitting, wait and still no one is transmitting, then you can transmit”. So, it relies on Tx station’s own Rx to see if somebody is Txing or not. What if somebody is actually transmitting but the station cannot hear that? Of course it will transmit and it will cause a collision.
Collision means re-transmit, and re-transmit means lower speed transmission, and lower speed transmission means longer “duration” values for everybody out there as longer NAVs for all STAs, which means more waiting in the medium by everyone, which means less overall throughput from the air.
So, in short, in our WiFi cell design, all STAs should be able to hear each other to make WiFi work correctly and efficiently.
On the other hand, RTS/CTS mechanism could be utilized in hidden-node environments, in which, AP uses RTS and CTS frames to distribute NAV timers in the RF domain to inform STAs to wait for duration specified in the CTS frame.
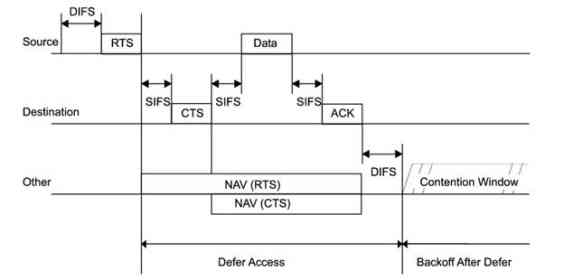
As shown in the above diagram, RTS packet from the source is also used to distribute NAV timer to other and the CTS is also distributing another NAV timer which means everybody out there (either received RTS or CTS) will be waiting until NAV timer expires plus DIFS and then they will all go into contention window)
Of course there is a possibility that many clients try to send RTS at the same exact time. This is possible. However, in general, RTS CTS mechanism makes good job relieving hidden node issues.
As you can see from the above explanations, all WiFi channel access mechanism is based on the assumption that every STA hears all transmission in the RF domain. However, in the real world, unfortunately, many WiFi designs are based on “coverage” rather than “capacity” which means very large coverage areas which makes clients cannot hear each other, lowering overall performance of the cell.
